صمم كل من الدكتور فديريكو رندا، الأستاذ المشارك في الهندسة الميكانيكية وإخلاص بن حميدة، باحثة مشاركة والدكتور أنوب ماثيو، باحث دكتوراه، صندوق أدوات يساهم في تسهيل عمليات التحليل الثابت والديناميكي لأنظمة الروبوتات الناعمة والصلبة والمختلطة، حيث يمكن الوصول لتلك الأدوات من خلال "ماتلاب"، منصة البرمجة التي يعتمد عليها المهندسون والباحثون في تحليل الأنظمة والنماذج وتصميمها.
وقال الدكتور فيديريكو: "اقتصر استخدام الروبوتات في الماضي على المصانع، حيث كانت توضع على مسافة بعيدة من الموظفين حفاظًا على سلامتهم. أما في الوقت الحالي، تدخل التطبيقات الروبوتية بشكل متزايد في مختلف بيئات التشغيل الصعبة والتي تتفاعل فيها الروبوتات مع الأجسام الحساسة عن قرب. فعلى سبيل المثال، تتعامل الروبوتات الطبية مع أنسجة جسم الإنسان بشكل مباشر وتنخرط الروبوتات المائية مع الحياة البحرية بشكل فعال وتساهم الروبوتات الزراعية في عمليات الإنتاج".
تتميز الروبوتات الناعمة بقدرتها العالية على التعامل مع جميع تلك السيناريوهات وبشكل أكثر مهارة من نظيراتها الروبوتات الصلبة، حيث تتميز بإمكانية طيّها لأنها مصنوعة من مادة مرنة تشبه مادة المطاط الصناعي. إضافة لذلك، يمكن إعادة تشكيل الروبوتات الناعمة والتحكم بهيكلها بطريقة تتيح لها إنجاز المهام الموكلة إليها في مختلف البيئات.
وفي هذا الصدد، طور فريق جامعة خليفة البحثي روبوتًا ناعمًا للاستفادة منه تحت الماء، حيث تم تصميم هذا النوع من الروبوتات ليكون خاملًا خارج البيئات المائية التي يكون فيها قادرًا على التنقل ضمن مجموعة من الإعدادات والتصاميم الهندسية. وترتكز آلية تشغيل هذا النوع من الروبوتات على الطريقة التي تتفاعل من خلالها بعض الكائنات الحية الدقيقة مع الطبيعة المحيطة.
يتطلب تصميم هذه التكنولوجيا تخطي مجموعة من العراقيل الفريدة من نوعها، نظرًا لصعوبة نمذجة الروبوتات التي تتمتع بحرية مطلقة. ومن جهة أخرى، تعتبر أدوات النمذجة المتوفرة اليوم بسيطة وسهلة من الناحية النظرية، لكنها تتطلب الكثير من العمليات الحوسبية المكثفة وتساهم في تحقيق المحاكاة لأغراض عامة فقط ولا يمكن الاستفادة منها عمليًا في مجال التحليل والتحكم بالتصميم بسبب بطئها.
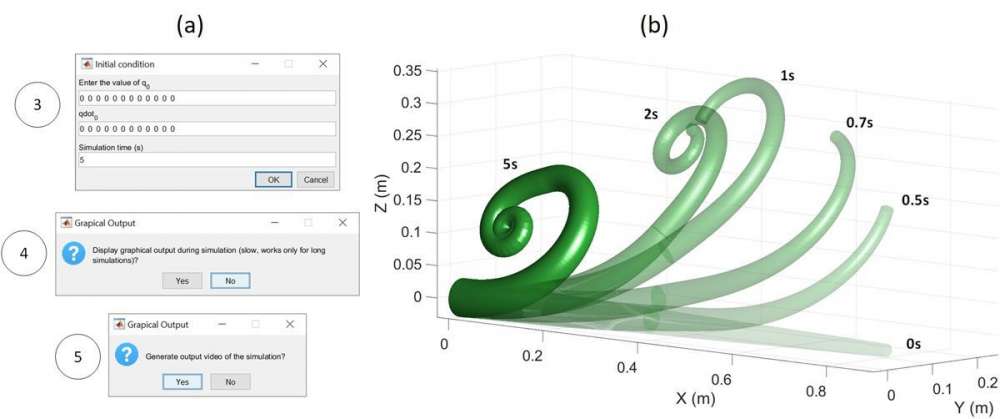
طور الباحثون نموذج "محاكاة الروبوتات الناعمة"، وهو صندوق أدوات يقوم على تطوير ثلاثة عناصر عبر برمجية "ماتلاب" وهي، الروابط والوصلات وخاصية الالتواء. تساهم الروابط في تمكين المستخدم من تحديد الروابط الناعمة والصلبة لمجموعة متنوعة من المفاصل وتتيح الوصلات إمكانية تجميع العديد من الروابط في سلاسل وتحديد العوامل الخارجية كالجاذبية الأرضية ومدخلات التشغيل. أما خاصية الالتواء، فتسهل على المستخدم تحديد درجة حرية المفاصل ومرونتها.
وأضاف الدكتور فريديريكو: "ساهمت هذه المنهجية في تمكيننا من تعزيز هذه العناصر وتطوير فعاليتها دون الحاجة لإعادة هيكلة مجموعة الأدوات، كما قمنا في هذا البحث بإضافة المزيد من أساليب الحوسبة المتقدمة وديناميكيات النمذجة في إطار عمل برمجية "ماتلاب".
يذكر أنه يمكن الاستفادة من منهجية "محاكاة الروبوتات الناعمة" في حل المشكلات المتعلقة بالتحكم بالتصاميم وتحسينها، لما تتمتع به هذه التكنولوجيا من سرعة في المحاكاة تفوق الوقت الفعلي.
قال الدكتور فيديريكو: "ساهم استخدام برمجية ماتلاب في تمكين التكنولوجيا التي طورناها من حل التحديات المعقدة من خلال دمج الأدوات، وسنقوم بإجراء المزيد من التطوير على منهجية ’محاكاة الروبوتات الناعمة‘ مستقبلًا لتحقيق الاستفادة الأمثل لجميع المستخدمين والباحثين المتخصصين في الروبوتات".